
设OA为地面上已知方向线,要在O点以OA为起始方向,顺时针方向测设出给定的水平角β,其法为()。A、测设水平角的精密方法B、测设水平角的一般方法C、测设水平角的复杂方法D、测设水平角距离的方法
题目
设OA为地面上已知方向线,要在O点以OA为起始方向,顺时针方向测设出给定的水平角β,其法为()。
- A、测设水平角的精密方法
- B、测设水平角的一般方法
- C、测设水平角的复杂方法
- D、测设水平角距离的方法
相似考题
更多“设OA为地面上已知方向线,要在O点以OA为起始方向,顺时针方向测”相关问题
-
第1题:
图示质量为m、长为l的杆OA以的角速度绕轴O转动,则其动量为: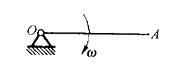
 答案:C解析:提示:根据动量的公式:p=mvc。
答案:C解析:提示:根据动量的公式:p=mvc。 -
第2题:
图示四连杆机构OABO1中,OA=O1B=1/2AB=L,曲柄OA以角速度ω逆时针向转动。当φ=90%,而曲柄O1B重合于O1O的延长线上时,曲柄O1B上B点速度vB的大小和方向为: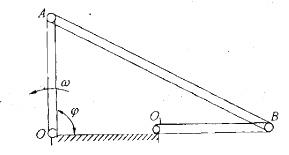
 答案:D解析:提示:OA及O1B定轴转动,AB为平面运动,AB杆的瞬心为O。
答案:D解析:提示:OA及O1B定轴转动,AB为平面运动,AB杆的瞬心为O。 -
第3题:
均质细直杆OA的质量为m,长为l,以匀角速度W绕O轴转动如图所示,此时将OA杆的惯性力系向O点简化。其惯性力主矢和惯性力主矩的数值分别为( )。
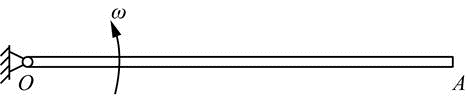
 答案:D解析:
答案:D解析:
-
第4题:
如图4-48所示直角弯杆OAB以匀角速度ω绕O轴转动,并带动小环M沿OD杆运动。已知OA=l,取小环M为动点,OAB杆为动系,当 φ =60°时,M点牵连加速度ae的大小为( )。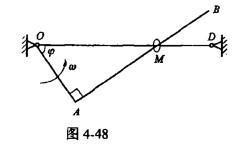
 答案:D解析:
答案:D解析: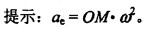
-
第5题:
图4-49所示机构中,曲柄OA以匀角速度绕O轴转动,滚轮B沿水平面作纯滚动,如图4-48所示。己知OA=l, AB=2l,滚轮半径为r。在图示位置时,OA铅直,滚轮B的角速度为( )。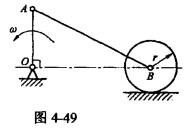
 答案:A解析:提示:杆AB瞬时平移,vA=vB。
答案:A解析:提示:杆AB瞬时平移,vA=vB。 -
第6题:
军事地形学中的方位角是指:()
- A、从某点的指北方向线起顺时针方向至目标方向线间的水平夹角
- B、从某点的指南方向线起顺时针方向至目标方向线间的水平夹角
- C、从某点的指南方向线起逆时针方向至目标方向线间的水平夹角
- D、从某点的指北方向线起逆时针方向至目标方向线间的水平夹角
正确答案:A -
第7题:
工程现场,A点为已知点,AB为已知方向,欲测设C点,使∠BAC为90°,试述用光学经纬仪按一般方法测设C点的基本步骤。
正确答案:A点为已知点,AB为已知方向,欲放样β角,标定AC方向。安置经纬仪于A点,先用盘左位置照准B点,使水平度盘读数为零,转动照准部使水平度盘读数恰好为β值,在此视线上定出C′。然后用盘右位置照准B点,重复上述步骤,测设β角定出C″点。最后取C′C″的中点C,则∠BAC就是要测设的β角。 -
第8题:
测设已知水平角是根据水平角的已知数据和一个已知方向,在地面上把该角的另—个方向测设出来。
正确答案:正确 -
第9题:
当测设的角度精度要求一般时,测设的具体步骤是()。
- A、设在地面上已有AB方向,要在A点以AB为起始方向,按设计图给出或计算出向右测设的水平角β
- B、将经纬仪安置在A点,用盘左测设β
- C、固定照准部,倒转望远镜成盘右,测设β角
- D、取盘左、盘右测设的中点,为所测设的β角
- E、测量A点水平角进行角度改正
正确答案:A,B,C,D -
第10题:
在A点以B点为已知方向用极坐标法测设P点,已知αBA=210°18′,αAP=208°06′,则测设角值为()。
- A、177°48′
- B、58°24′
- C、2°12′
- D、357°48′
正确答案:A -
第11题:
问答题在A点以B点为已知方向用极坐标法测设P点,已知αBA=210°18’00",αAP=208°06’00",试求测设角值。正确答案: αAB=αBA-180°=30°18’00"
β=αAP一αAB=177°47’00"解析: 暂无解析 -
第12题:
单选题军事地形学中的方位角是指()A从某点的指北方向线起顺时针方向至目标方向线间的水平夹角
B从某点的指南方向线起顺时针方向至目标方向线问的水平夹角
C从某点的指南方向线起逆时针方向至目标方向线间的水平夹角
D从某点的指北方向线起逆时针方向至目标方向线间的水平夹角
正确答案: D解析: 暂无解析 -
第13题:
杆OA绕固定轴O转动,长为l。某瞬时杆端A点的加速度a如图所示,则该瞬时OA的角速度及角加速度为( )。
 答案:B解析:
答案:B解析:
-
第14题:
杆OA = l,绕固定轴O转动,某瞬时杆端A点的加速度a如图所示,则该瞬时杆OA的角速度及角加速度为:
 答案:B解析:提示:根据定轴转动刚体上一点加速度与转动角速度、角加速度的关系:an=ω2l,at=αl ,而题中an=acosα , at=asinα。
答案:B解析:提示:根据定轴转动刚体上一点加速度与转动角速度、角加速度的关系:an=ω2l,at=αl ,而题中an=acosα , at=asinα。 -
第15题:
均质细直杆OA长为l ,质量为m,A端固结一质置为m的小球(不计尺寸),如图所示。当OA杆以匀角速度w绕O轴转动时,该系统时O轴的动量矩为: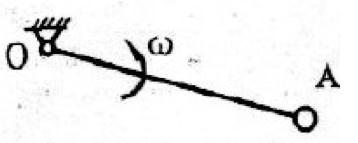
 答案:D解析:
答案:D解析:
-
第16题:
在图4-47所示机构中,已知OA= 3m, O1B = 4m, ω=10 rad/s,图示瞬时O1A =2m,则该瞬时B点速度的大小为( )m/s。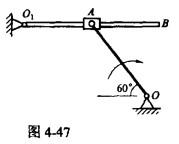
 答案:A解析:提示:以滑块A为动点,动系固结在杆O1B上,画出三种速度的平行四边形。
答案:A解析:提示:以滑块A为动点,动系固结在杆O1B上,画出三种速度的平行四边形。 -
第17题:
杆OA=l,绕固定轴O转动,某瞬时杆端A点的加速度a如图4-41所示,则该瞬时杆OA的角速度及角加速度为( )。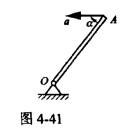
 答案:B解析:提示:根据定轴转动刚体上一点加速度与转动角速度、角加速度的关系:an=ω2l,at=αl而题中 an= acosα,at =asinα。
答案:B解析:提示:根据定轴转动刚体上一点加速度与转动角速度、角加速度的关系:an=ω2l,at=αl而题中 an= acosα,at =asinα。 -
第18题:
在A点以B点为已知方向用极坐标法测设P点,已知αBA=210°18’00",αAP=208°06’00",试求测设角值。
正确答案: αAB=αBA-180°=30°18’00"
β=αAP一αAB=177°47’00" -
第19题:
设A、O、B为地面上三点,简述用全站仪按二个测回测定OA、OB两个方向之间的水平角β的基本方法。
正确答案:⑴在O点架设全站仪,A、B点安置目标棱镜;
⑵上半测回(盘左):先瞄准目标A,得水平度盘读数a1,顺时针转动照准部瞄准目标B,得水平度盘读数b1,并计算得盘左角值:β左=b1-a1;
⑶下半测回(盘右):先瞄准目标B,得水平度盘读数b2,逆时针转动照准部瞄准目标A,得水平度盘读数a2,并计算得盘左角值:β右=b2-a2;
⑷计算测回角值:β=(β左+β右)/2。 -
第20题:
已知水平角的测设,就是根据地面上一点及一给定的方向,定出另外一个方向,使得两方向间的水平角为给定的()。
正确答案:已知值 -
第21题:
设地面上已有直线OA,欲在O点标定出直线OB,使其两直线所夹的水平角为事先给定的(设计的)角值β,简述施测步骤?
正确答案: (1)将经纬仪安置在O点上,对中、整平后,用盘左位置瞄准A点,配置度盘0°00’00”,顺时针转动照准部,使读数恰好为B时,制动照准部,在视准轴方向标定出B1点;
(2)用盘右位置瞄准A点,使度盘读数为180°00’00”,按上述方法,同样测设出B角,标出B2点;
(3)由于仪器误差,一般B1和B2不重合,在规定限差内,取其中点B,则∠AOB即是所要测设的水平角B。 -
第22题:
水平角观测中,盘左起始方向OA的水平度盘读数为358°12’15",终了方向OB的对应读数为154°18’19",则∠AOB前半测回角值为:()
- A、156°06’04"
- B、-156°06’04"
- C、203°53’56"
- D、-203°53’56"
正确答案:A -
第23题:
单选题在A点以B点为已知方向用极坐标法测设P点,已知αBA=210°18′,αAP=208°06′,则测设角值为()。A177°48′
B58°24′
C2°12′
D357°48′
正确答案: A解析: 暂无解析